起因 : https://www.instructables.com/id/Pocket-laser-engraver/
這邊首先先處理功能模組篇
最主要的目標是 :
把 DVD 裡面的步進馬達區塊拆下來後
連接 Arduino + CNC 模組板
並測試運轉是否正常
然後 Z 軸的控制還有分控制 「伺服馬達 (Servo)」 和 「雷射模組 (Laser)」
後面我們也會介紹
材料準備
- 二手光碟機 * 2
- Arduino UNO * 1
- CNC Shield v3 模組 * 1
- A4988 步進電機驅動器 * 2
- 電壓器 (9v ~ 12v) * 1
- 跳線帽 * 12
- 伺服馬達 * 1
- 柔性扁平排線 4 pins * 2
Step 1. 拆光碟機

想辦法取出步進馬達區塊 x 2
心得 : 讀片夾要先抽出來,接下來才會比較好拆,讀片夾可以用針磋出來
Step 2. 焊接步進馬達控制排線


原來的軟排線可以剪掉

話說怎麼知道馬達的 4 個焊點哪 2 點是一組 ?
可以使用三用電表,轉到會「嗶嗶叫」的檔位進行測試
測到 2 點會嗶的表示通電 = 是一組的
焊接技巧純屬經驗
如果不熟焊接的話建議先隨便拿個 PCB 版
然後剪幾段短銅線在一旁練習
練到手感差不多抓到訣竅後再來挑戰
小訣竅 : 在要焊接的接點上先上一些焊錫,會比較好焊
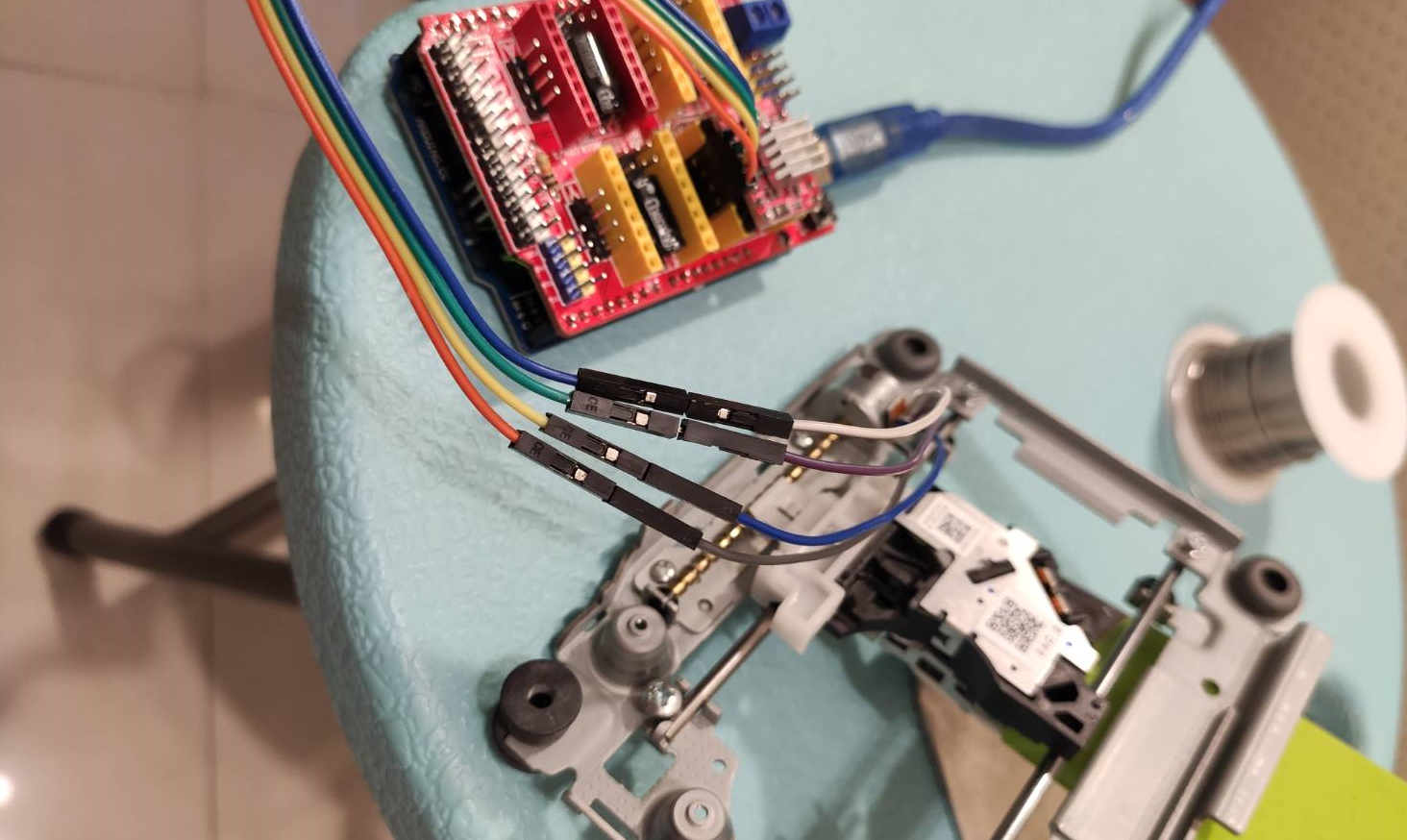
Step 3. Arduino Uno 和 CNC Shield V3 組裝

- 接上 A4988 晶片
特別注意: 插上 9V~ 12V 電源後,如果 A4988 晶片接反的話可是會直接「燒掉」(我就直接壞了一顆)
其他參考 : 步進馬達 & CNC shield & A4988 (介紹) - 接上 Step 2 焊好的步進馬達排線,接反沒關係,只會移動反方向
- 接上跳線帽 (3 * 4),接上與沒接的差別在馬達轉動的精度,全接上後會比較穩定
- 接上 9v ~ 12v 的電源供應器,我這邊直接買
可調變壓器(3v ~ 12v),另外焊接電源孔母座(大小要注意) - 下面會先用伺服馬達作為 z 軸演示,可以先照著上圖這樣配置,馬達的紅棕線為正負極接到 5v, GND,橘線為 PWM 控制腳位接到 Z+
Step 4. 燒錄 grbl-servo
-
Download grbl-servo zip : https://github.com/robottini/grbl-servo
-
載入剛剛下載的函式庫,載入成功後會看到
grbl-servo-master
-
點選
grbl-servo-master就會把函示 include 到檔案裡

-
確認連接好 Arduino 開發版

-
開始燒入

Step 5. 製作 Gcode 檔
G 代碼是連接電腦和3d印表機的「橋樑」,利用G代碼,我們可以通過電腦「告訴」3d印表機什麼時候列印,在哪兒列印,如何移動,擠出多少等。
-
這邊我們使用 Inkscape 進行製圖和轉檔
-
另外還要下載轉 Gcode for CNC Shield 的 plugin : Inkscape Laser Plug-In
-
如何匯入
Inkscape Laser Plug-In
將上述下載的檔案都放到C:\Program Files\Inkscape\share\extensions -
重開 Inkscape > 擴充功能 就可以看到了

-
檔案 > 文件屬性 : 將畫布尺寸設定為 17 x 17 mm , 畫布大小請依照各自情況而定

-
在畫布上隨便寫個文字吧

-
轉 Gcode 之前,記得一定要將圖片物件轉換成
路徑格式
-
匯出設定參數,可以參考下圖
Laser Power S# : 用在 Servo 裡的話表示轉動角度,這裡我是設定 90 度
套用後就會成功匯出 Gcode 檔了
- 匯出成功後你會得到一個爆炸圖,別擔心這樣是正常的

Step 6. Using Grbl
Grbl Controller 3.6 : Download
其他 GUI 參考 : https://github.com/grbl/grbl/wiki/Using-Grbl

- 選擇已燒錄成功的 Arduino COM Port
- Baud Rate : 115200
- 選擇你剛剛畫好產生的 Gcode 檔 > Begin
- 顯示目前執行到哪個地方
實機完成演示
Summary
看別人實作的影片都感覺很簡單
但實際動手做的時真是遇到滿滿的坑
特別是選 FW 時,其實還有區分
因為要使用伺服馬達當作 Y 軸
所以特別找到有 grbl 支援 servo 的版本
之前實作一直不知道 servo 怎麼驅動
只有 X, Y 軸會動
Inkspace 也是一個坑
網路上很多資料各種做法
後來才發現原來 Larser plugin extention 也可以支援驅動 servo 轉動角度
因為控制命令是一樣的 : M03 S## (開: 幾度), M05(關)
至於 grbl 的控制命令
這部分我還不是很懂怎麼配置
有空研究完成再陸續補上
然後看到最後的人會不會有個疑問…
雷射頭在哪 ?
抱歉,買的時候買到功率比較小的
所以就改成用伺服馬達當作替代測試
雷射功率至少要 100 mw 以上好像才可以達到燒焦的效果
我後來發現我買的是 5V, 5mw….
之後應該會買 250mw
Reference
- https://www.youtube.com/watch?v=Gm6bH3p6cNQ&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=2&t=146s
- https://www.youtube.com/watch?v=Q5ma1HDuotk&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=3&t=7s
- https://www.youtube.com/watch?v=vxhYIVOXXXk&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=6&t=369s
- https://www.youtube.com/watch?v=SamSyZtsA5E&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=7&t=0s
- https://www.youtube.com/watch?v=SamSyZtsA5E&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=7&t=0s
- https://www.youtube.com/watch?v=XKnEcPSUlLQ&list=PLcFE2K6uLREfsOshfInsi4wgHPNdfsxKK&index=8&t=257s
- Inkscape : 向量圖檔轉G-code文字教學
- Drawing Robot - Arduino Uno + CNC Shield + GRBL
- GRBL CNC Shield + Z Axis servo MIGRBL
- Cyclone PCB 使用Inkscape Gcodetools 將圖片轉換G碼(G-CODE)